





























Come clean, man. If you ride a motorcycle, you have some sort of relationship with “the edge.”
Sedate touring riders may leave a healthy buffer between themselves and that edge while racers live on the edge: that place where your motorcycle’s contact patches are at or just beyond their limits of adhesion.
The reaction time of an average human is around three quarters of a second, or 750 milliseconds. Reaction time of a trained MotoGP rider has been tested at about 270 milliseconds. What does that mean in practice? It means Marc Márquez can uncrash a motorcycle he has just crashed, but you, statistically speaking, probably cannot.
That’s why we have traction control and other electronic rider aids to help us. There are limits there, too, in reaction time. A change in power involves air mixed with fuel flowing through the intake tract to opening valves, combustion occurs, the exhaust valves open, and the spent gases exit. The impulse produced by combustion is transmitted though the crankshaft to a geared or chain driven primary drive, though multiple gearsets in the transmission, and then though a chain or shaft final drive to the wheel and contact patch.
Each step may be short, but in the aggregate, the system has a significant and measurable time lag, perhaps a few hundred milliseconds. But what about a motorcycle with an electric drivetrain?

In Zero Motorcycles’ new SR/F, the lag between throttle input and action at the rear contact patch has been measured at around 60 milliseconds. Even Márquez can’t hope to react that fast, so that brings us to electronics.
The Zero SR/F and Bosch MSC
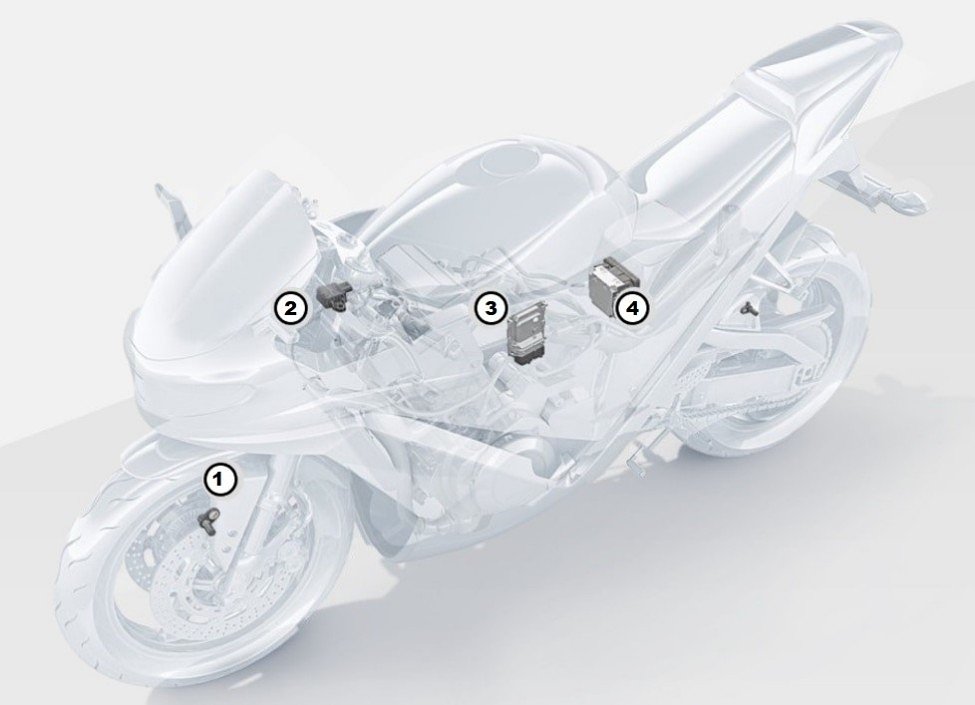
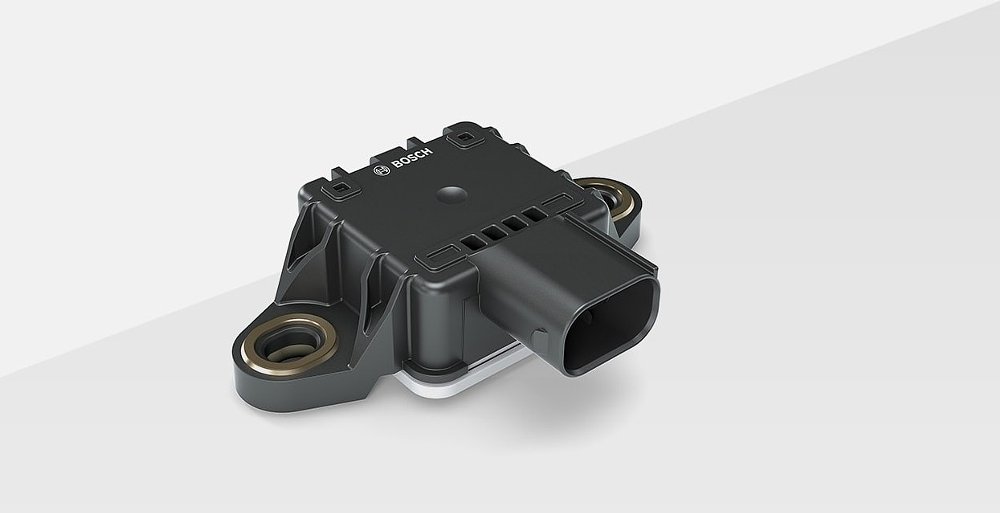
The new Zero SR/F is the first electric motorcycle to use Bosch’s Motorcycle Stability Control (MSC) system. MSC combines straight-line and lean-angle-sensitive ABS, straight-line and lean-angle-sensitive traction control, engine-braking torque control, hill start control, wheelie control and rear wheel lift control. MSC accomplishes this by building the system around an Inertial Measurement Unit (IMU), a sensor that detects lean or roll angle, acceleration, deceleration, and chassis pitch so that it can accurately describe the overall dynamic behavior of the motorcycle.
As Zero Chief Technical Officer Abe Askenazi put it, “advancing to the next step in power output would require more control.” And the 140 foot-pounds of torque — simply stonking levels of power — produced by the next-generation Z-Force 75-10 electric motor in the SR/F, demand the response times of a state-of-the-art electronic stability control system.
Zero had worked previously with Bosch to incorporate ABS on their S, DS, SR and DSR models, so during the design phase of the SR/F, they reached an agreement with Bosch to include MSC on the new, more powerful motorcycle.
Robert Bosch GmbH has been a critical supplier to the global motorcycle industry for a century. Wander through any motorcycle museum and one can see the evidence. The company opened its first U.S. sales office in 1912 and the major U.S. motorcycle manufacturer of the time — Indian, Harley-Davidson, Flying Merkel, Excelsior, Iver Johnson — produced models equipped with a Bosch magneto ignition. Bosch generators, voltage regulators, lighting, and horns soon followed.
The first Bosch ABS systems for motorcycles, based on the company’s work in the automotive business, came out in 1988. Traction control systems that used the wheel speed sensors required by ABS followed soon after. The early motorcycle ABS and TC implementations were based on a rudimental physics models, however, in that they monitored wheel speed rotation and impending lockup or power slides with the assumption that the motorcycle and contact patch were straight up and down. Lean a motorcycle over, however, and an additional variable is introduced. As more traction is used for leaning, less traction is available for braking or acceleration. Lift the front wheel under acceleration, and things get more complex still.
Awareness of those limitations was the basis for the development of Bosch’s MSC. By incorporating the IMU, MSC’s software is capable of modelling the traction pie that you were taught in the Motorcycle Safety Foundation training — that a leaned over motorcycle has less traction for braking, acceleration or engine braking — only MSC is a great deal faster at it than you are. The MSC system uses a variety of strategies to keep what is happening at the contact patches inside the limits of that physics model, and hence, keep your motorcycle on the road and upright.
To keep the bike inside the envelope described by the software physics model, the MSC controller communicates with two major subsystems: the brakes and, in a motorcycle with an internal combustion engine, the engine control unit (ECU). MSC may reduce engine output to control wheel spin under power or reduce engine braking, for example.
I’ll admit that before speaking with the Bosch engineering team, I had assumed that integration of their MSC controller and a new type of power controller — in this case Zero’s new proprietary Cypher III electric drivetrain controller — represented a large-scale re-engineering effort of the entire system. It wasn’t quite like that.
As a result, the team described the scope of their effort to adapt MSC to the Zero as “calibration.” That description does not, in any way, reduce the scope and scale of the types of software development they needed to complete, but that original architectural decision did make the job less complex.
“MSC was designed and intended to be open and extensible from inception,” said Bosch Engineering Director Karl Dresen. “We knew it would have other power applications, such as electric, so it was designed to support them from the start.”
Instant response
So, back to that 60 millisecond lag. Several elements of the Zero SR/F’s design make it inherently responsive. Few moving parts and less inertia. The pinion output of the engine is connected directly to the rear drive pulley by a high tension, carbon fiber drive belt. There is no delay or power loss caused by transmission gearsets or turns/reversals of drive power anywhere in the system. If that were not sufficient, the Zero SR/F incorporates one of those long-desired but seldom accomplished motorcycle design goals — a coaxial location of the drive pinion gear with the swingarm pivot. This design means that the drive belt tension does not change based on swingarm movement and therefore has no effect on movement of the rear suspension.

The Zero SR/F provides as direct and quick a connection between power output and contact patch as anything in motorcycling.
That provided an opportunity to the Bosch Zero/MSC Project Team to unleash potential in the MSC system that internal combustion powertrains only hinted at. The Bosch team was understandably reticent, for intellectual property reasons, to provide information on overall system response times to detected traction reduction events in ICE powertrains. Based on academic research published by the IEEE and the University of Tokyo, the measured delay from sensor detection to operation of a ride by wire throttle butterfly is approximately 200 milliseconds. Given the additional mechanical elements — transmission, drive chain, etc. — my best estimate is about 300 to 400 milliseconds total delay between sensor detection and the drive tire contact patch. Compare that to the SR/F’s measured delay of 60 milliseconds, as confirmed by Zero’s Askenazi.
One more kind of fast communication
In every motorcycle development program with which I am acquainted, whether on the street or on the racetrack, the communication between the development rider and the engineers is the single most important determinant of how polished the final product becomes. In this case, there was no communication. Bosch’s application engineer on the Zero/MSC integration project was Eric Greenham, who was also the project’s lead test rider.
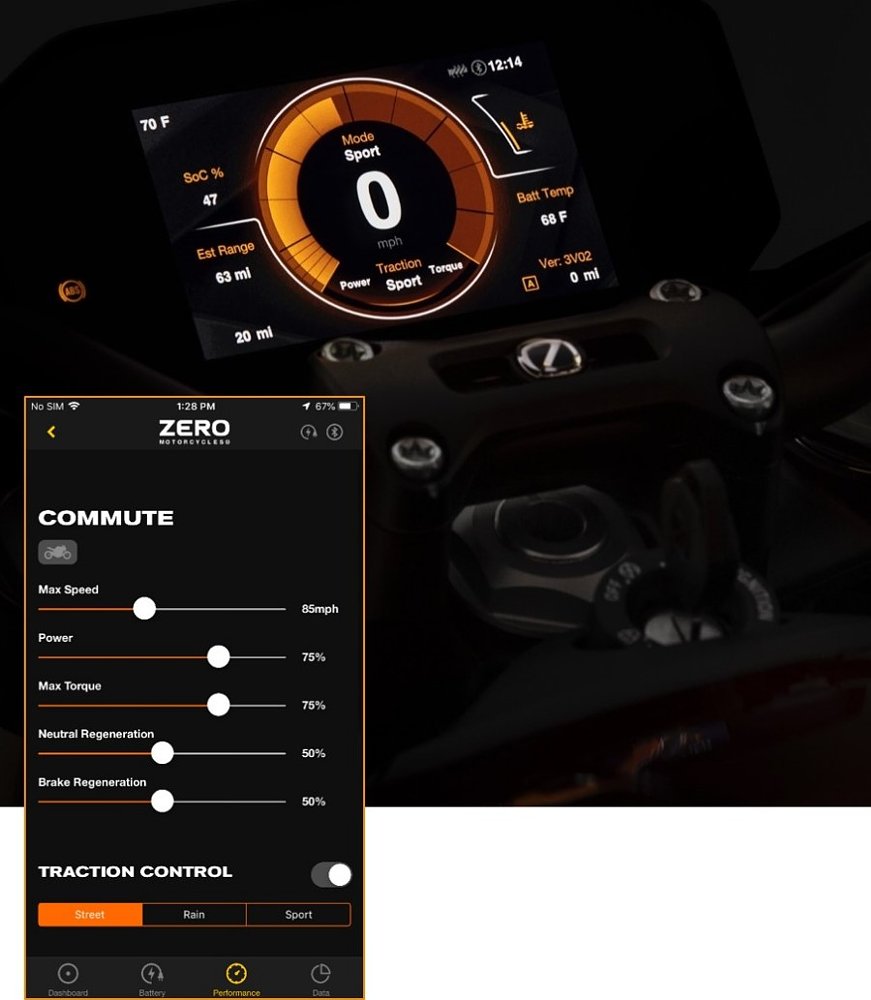
Having the MSC software produced by the same person who was evaluating it on the test range and the track meant no risk of miscommunication. By having detailed knowledge of both the motorcycle’s behavior on the road and where and how those functions were implemented in the software, Greenham was able to tune the software. One critical process is determining the threshold of system intervention and the magnitude of that intervention — for example, at what point of wheel slippage when accelerating out of a corner would the system override user input, and how much adjustment would it make. Too much intervention too early, and the motorcycle’s response is reduced to the point of numbness. Get the calibration thresholds right and one preserves the sensation of thrilling response and rider control.
The system should, as Askenazi put it, “make the rider feel like Superman.”
The impression I took away from my conversations with both the Bosch and Zero teams was one that bodes well for the future. Both teams are comprised of really passionate motorcycle enthusiasts who are also really passionate engineers, and they’ve been lucky enough to have been provided with a singular opportunity in combining MSC with an electric drivetrain.

Zero’s Askenazi likes to quote one of my favorite lines from the famed science fiction writer Arthur C. Clarke: “Any sufficiently advanced technology is indistinguishable from magic.” Testing the SR/F on a gravel surface, Askenazi said, opened the eyes of the Bosch team when, after years of working with internal-combustion motorcycles, they realized how responsive the SR/F could be.
Or, as engineer and test rider Greenham put it, “You just have to ride the bike.”
I can’t wait.








